

- Department of Neurosurgery, Spine Surgery Division, Sheba Medical Center, Ramat-Gan, Affiliated to Sackler Medical School, Tel-Aviv University, Tel-Aviv, Israel.
- Sackler Faculty of Medicine, Tel-Aviv University, Tel-Aviv, Israel.
Correspondence Address:
Ran Harel
Department of Neurosurgery, Spine Surgery Division, Sheba Medical Center, Ramat-Gan, Affiliated to Sackler Medical School, Tel-Aviv University, Tel-Aviv, Israel.
DOI:10.25259/SNI_340_2019
Copyright: © 2019 Surgical Neurology International This is an open-access article distributed under the terms of the Creative Commons Attribution-Non Commercial-Share Alike 4.0 License, which allows others to remix, tweak, and build upon the work non-commercially, as long as the author is credited and the new creations are licensed under the identical terms.How to cite this article: Ran Harel, Maya Nulman, Nachshon Knoller. Intraoperative imaging and navigation for C1-C2 posterior fusion. 26-Jul-2019;10:149
How to cite this URL: Ran Harel, Maya Nulman, Nachshon Knoller. Intraoperative imaging and navigation for C1-C2 posterior fusion. 26-Jul-2019;10:149. Available from: http://surgicalneurologyint.com/surgicalint-articles/9528/
Date of Submission
03-Jun-2019
Date of Acceptance
16-Jun-2019
Date of Web Publication
26-Jul-2019
Abstract
Background: Cervical axial spine fusion is challenging as the anatomy is extremely variable, and screw misplacement can lead to severe complications. C1 lateral mass screws and C2 pedicle screws are routinely placed under either fluoroscopic guidance or imaging-assisted navigation. Here, we compared the two for axial screw placement.
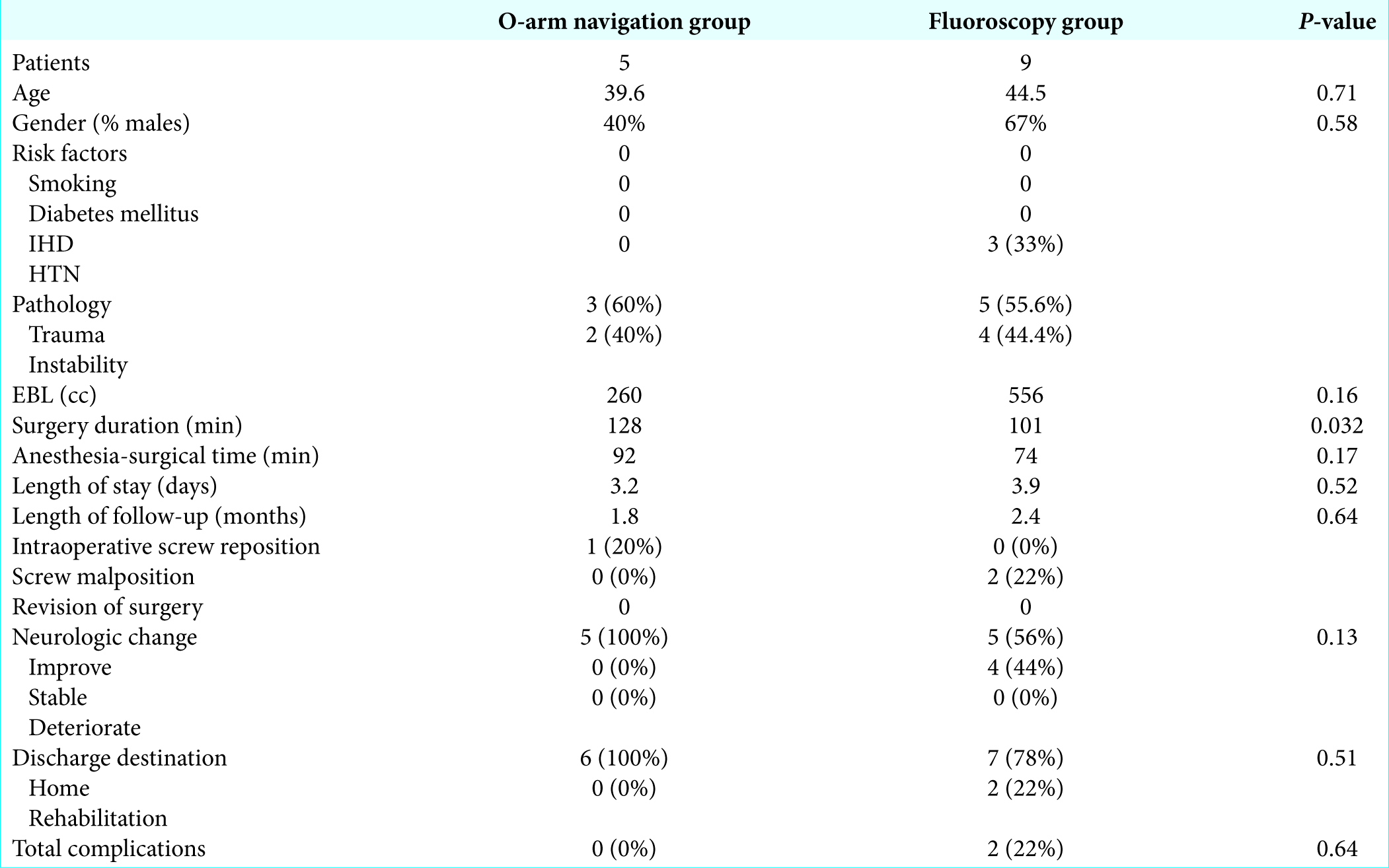
Methods: We retrospectively evaluated patients’ treated from 2011–2016 utilizing the Harm’s procedure for C1-C2 screw fixation performed under either fluoroscopic guidance (nine patients) or image-assisted O-arm navigation (five patients). The groups had similar demographic and risk factors. Variables studied included operative time, estimated blood loss (EBL), accuracy of screw placement, screw reposition rates, and reoperation rates.
Results: The mean EBL was 555CC and 260CC, respectively (not a significant difference) utilizing fluoroscopic versus O-arm navigation. Of interest, the mean surgical duration was 27 min longer in the O-arm versus fluoroscopy group (P = 0.03). Ten C2 pedicle screws were performed using O-arm navigation. Alternatively, as 9 of 18 C2 pedicles were considered “risky” for the placement of fluoroscopic-guided pedicle screws, laminar screws were utilized. Although the accuracy rate of C1 and C2 screw placement was higher for the navigated group, this finding was not significant. Similarly, despite complications involving two unacceptably placed screws from the fluoroscopic guidance group, there were no neurological sequelae.
Conclusion: Axial cervical spine instrumentation is challenging. Utilization of Imaging-assisted navigation increases the accuracy and safety of screw placement.
Keywords: Axial spine, Intraoperative imaging, Posterior cervical approach, Spine instability, Spine navigation
INTRODUCTION
On 1994, Goel and Laheri first described a C1-C2 fusion utilizing C1 lateral mass screws, C2 pedicle screws, and a metal plate.[
METHODS
With IRB approval, we performed a retrospective review (2011–2016) utilizing the Harm’s procedure for C1-C2 screw fixation performed under either fluoroscopic guidance (nine patients) or image-assisted O-arm navigation (five patients).
Surgical technique
The surgical technique for the fluoroscopic-guided group was previously described in multiple papers. As for the navigation- guided group, the O-arm was introduced; a lateral and AP views were taken to determine scan position. Following exposure, a scan was performed and transferred to the navigation unit. The lateral mass of C1 and C2 pedicle was drilled utilizing a navigated drill guide. The screwdriver was fitted with a Universal Tracker Instrument (Suretrak, Medtronic, Louisville, CO, USA), and screws were inserted into the drilled holes. O-arm scan confirmed screw positions. At the senior surgeon discretion, screw positions were adjusted during surgery. We reviewed patient’s demographics and statistical analysis was performed using the Student’s t-test and Chi-squared test. P = 0.05 was considered statistically significant.
RESULTS
Before 2015, nine consecutive patients had fluoroscopic guidance for C1-C2 fusions, while between 2015 and 2016, five consecutive patients utilized O-arm navigation [
Assessment of the accuracy of screw placement with fluoroscopy versus O-arm
All the screws in the navigated group were graded as either optimal position (90% and 80%) or acceptable position (10% and 20%) [
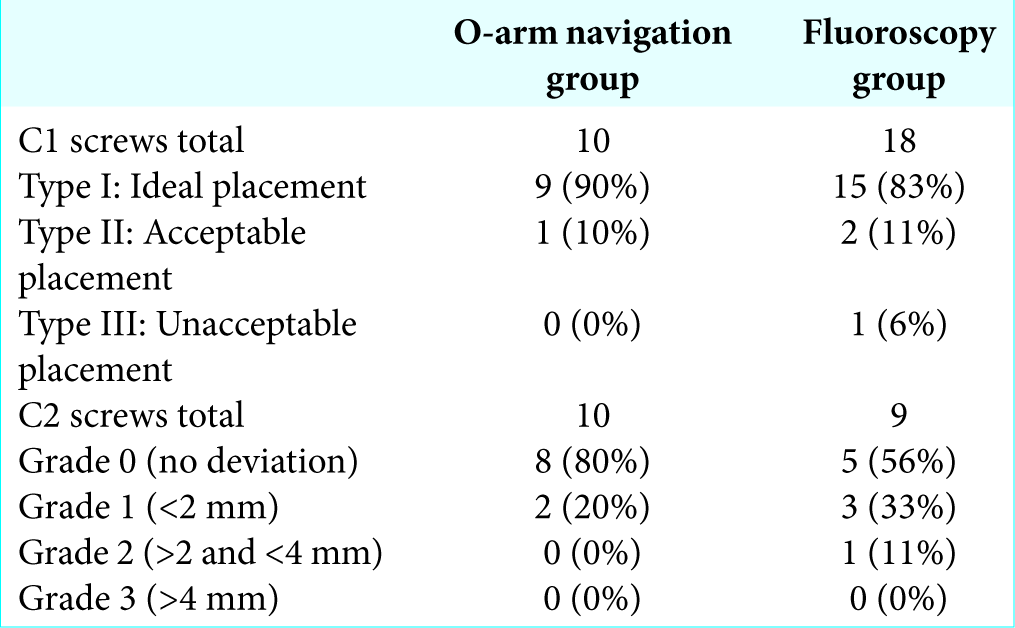
In the fluoroscopy group, only one of nine patients showed an unacceptably placed C1 screw (e.g., 1 Grade II (>2 mm, <4 mm) C2 screw). The fluoroscopic C1 accuracy rate was ideal (83%) and C2 Grade 0 (no deviation; 56%).
In 9 of 18 C2 screws in the fluoroscopy group, the surgeon decided to perform laminar screw rather than pedicle screw due to anatomical variations including narrow pedicle or hypertrophied vertebral artery.
Complications involving O-arm navigation and fluoroscopic C1-C2 screw placement
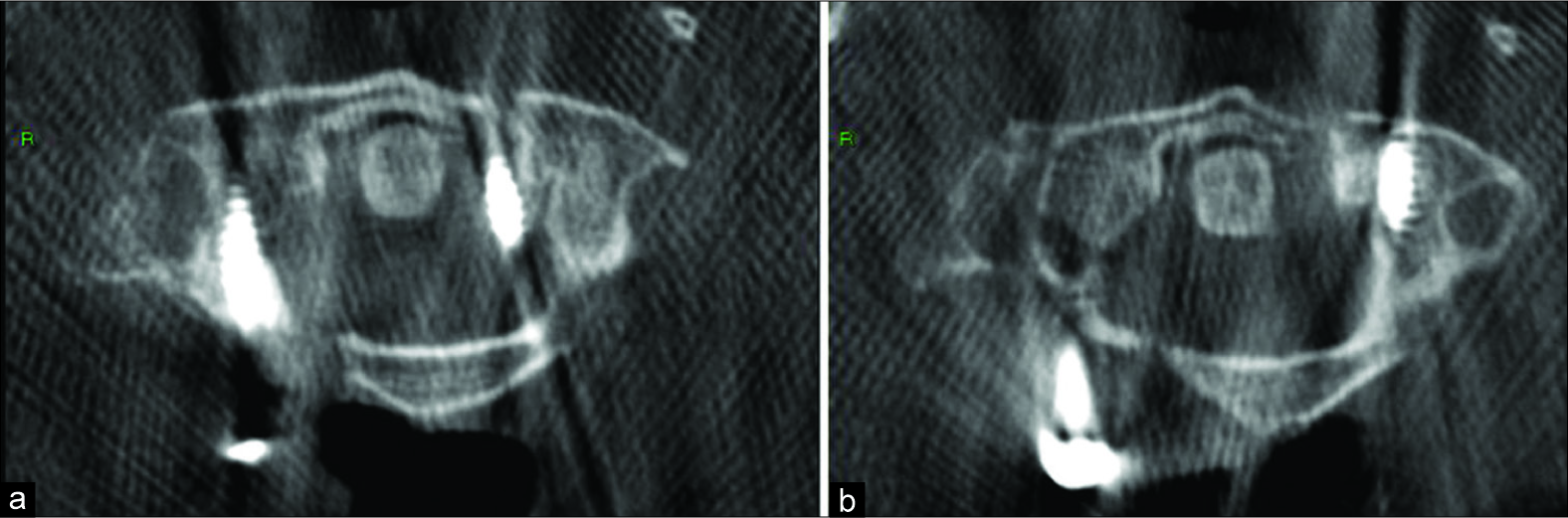
All of the O-arm navigated cases were treated with C2 pedicle screws. One intraoperative scan demonstrated medial C1 screw position requiring repositioning during surgery (e.g., confirmed with a secondary scan) [
Using 2D fluoroscopy, there was one malpositioned C2 screw. This was picked up on the post-operative CT scan that demonstrated a lateral and inferior screw breach [Grade 2,
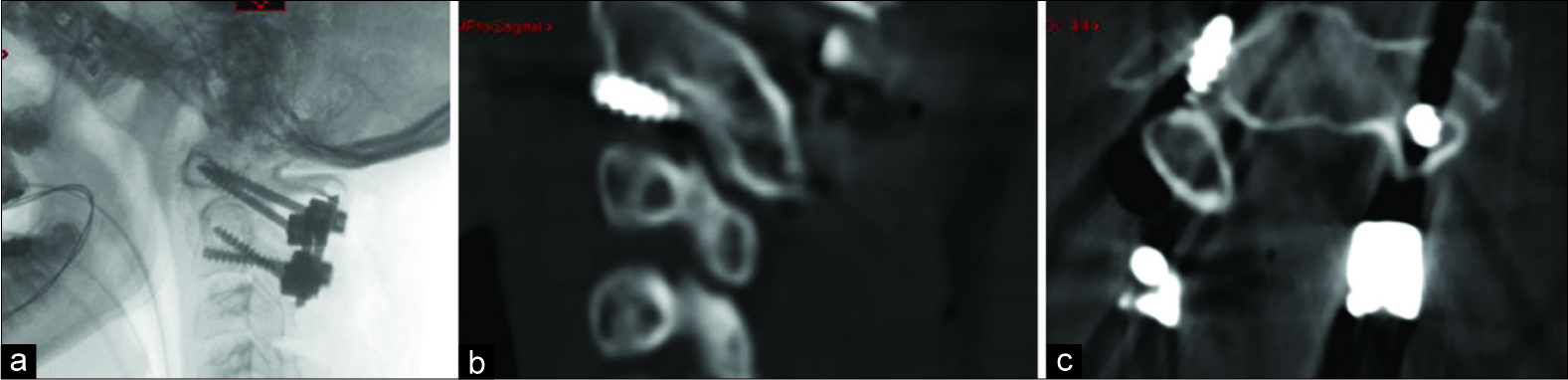
Figure 2:
A patient undergoing C1-2 fluoroscopic-guided procedure for Os odontoid. (a) Demonstrates lateral fluoroscopic view. Post-operative CT scan reveals a malpositioned right C2 screw that was not evident on 2D fluoroscopy. Post-operative sagittal (b) and axial (c) scans demonstrate lateral and inferior screw breach (Grade 2).
DISCUSSION
The subaxial cervical spine demonstrates high anatomical variability that increases surgical risks and suboptimal screw position. Utilization of navigation systems reportedly increases screw placement accuracy. Costa et al.[
When Hitti et al.[
Fluoroscopic-guided Harm’s procedure exposes the surgeons and the operating room team to ionizing radiation, forcing the team to work with lead aprons, thyroid shields, and protective eye covers. The surgeons need to customize their standing posture as the C-arm is partially obstructing access to the surgical site. Imaging-assisted navigation minimizes the surgical team radiation exposure, eliminates the need for radiation shields, and allows for comfortable access to the surgical site. This in term may reduce potential complication and personal health issues.[
CONCLUSION
The anatomical properties of C1-C2 stabilization procedure necessitate accurate and safe screw insertion. Imaging- assisted navigation reduces surgical team radiation exposure and seems to allow for higher screw accuracy rates and reduces EBL.
References
1. Abdullah KG, Bishop FS, Lubelski D, Steinmetz MP, Benzel EC, Mroz TE. Radiation exposure to the spine surgeon in lumbar and thoracolumbar fusions with the use of an intraoperative computed tomographic 3-dimensional imaging system. Spine (Phila Pa 1976). 2012. 37: E1074-8
2. Attia W, Orief T, Almusrea K, Alfawareh M, Soualmi L, Orz Y. Role of the O-arm and computer-assisted navigation of safe screw fixation in children with traumatic rotatory atlantoaxial subluxation. Asian Spine J. 2012. 6: 266-73
3. Costa F, Ortolina A, Attuati L, Cardia A, Tomei M, Riva M. Management of C1-2 traumatic fractures using an intraoperative 3D imaging-based navigation system. J Neurosurg Spine. 2015. 22: 128-33
4. Goel A, Laheri V. Plate and screw fixation for atlanto-axial subluxation. Acta Neurochir (Wien). 1994. 129: 47-53
5. Hadelsberg UP, Harel R. Hazards of ionizing radiation and its impact on spine surgery. World Neurosurg. 2016. 92: 353-9
6. Harms J, Melcher RP. Posterior C1-C2 fusion with polyaxial screw and rod fixation. Spine (Phila Pa 1976). 2001. 26: 2467-71
7. Hitti FL, Hudgins ED, Chen HI, Malhotra NR, Zager EL, Schuster JM. Intraoperative navigation is associated with reduced blood loss during C1-C2 posterior cervical fixation. World Neurosurg. 2017. 107: 574-8
8. Mason A, Paulsen R, Babuska JM, Rajpal S, Burneikiene S, Nelson EL. The accuracy of pedicle screw placement using intraoperative image guidance systems. J Neurosurg Spine. 2014. 20: 196-203
9. Smith JD, Jack MM, Harn NR, Bertsch JR, Arnold PM. Screw placement accuracy and outcomes following o-arm-navigated atlantoaxial fusion: A feasibility study. Glob Spine J. 2016. 6: 344-9

